
Отдел продаж
Сервисный отдел



С этим товаром покупают


Аппарат для механотерапии ОРТОРЕНТ МОТО Орторент





Аппарат для механотерапии ОРТОРЕНТ МОТО Орторент



Товар добавлен в корзину !
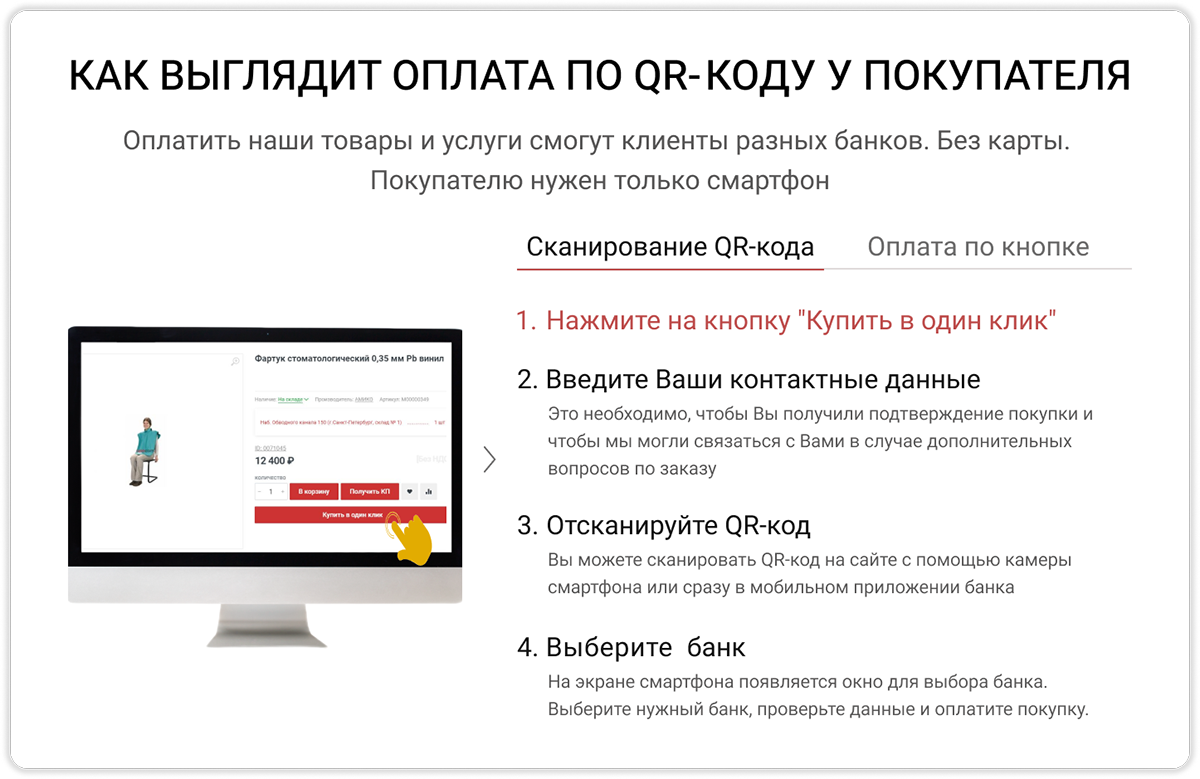
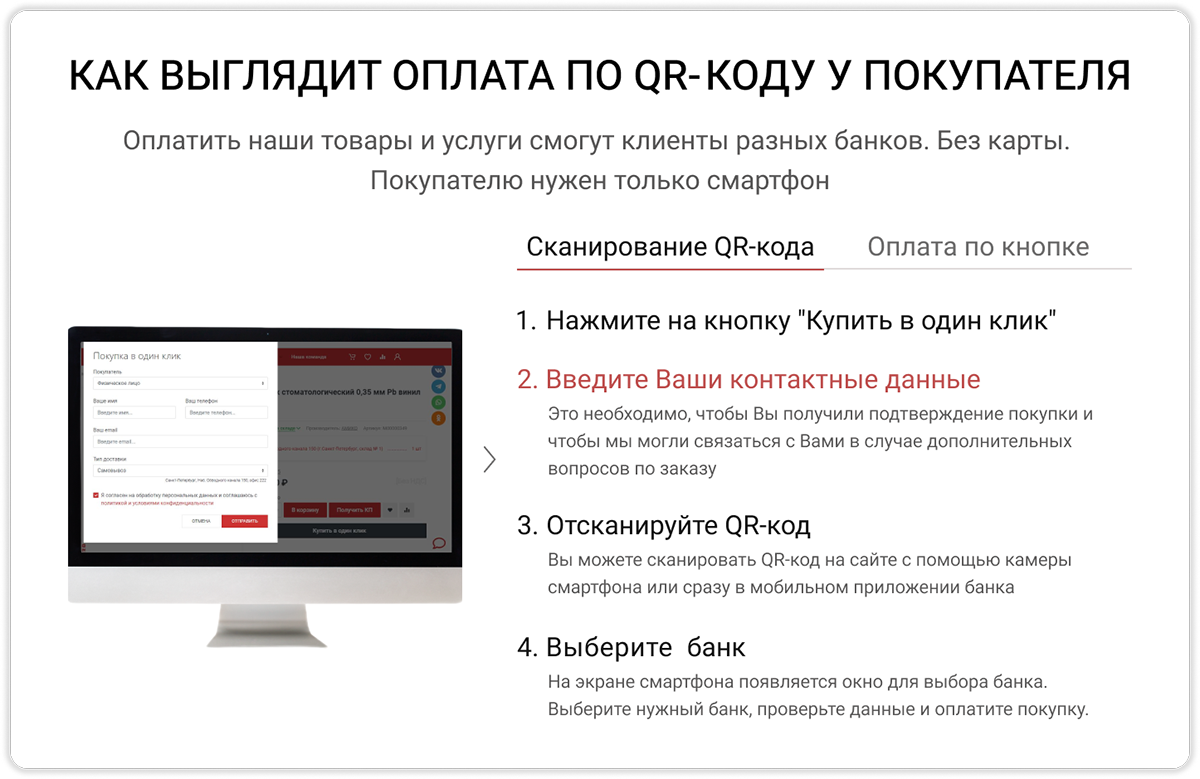
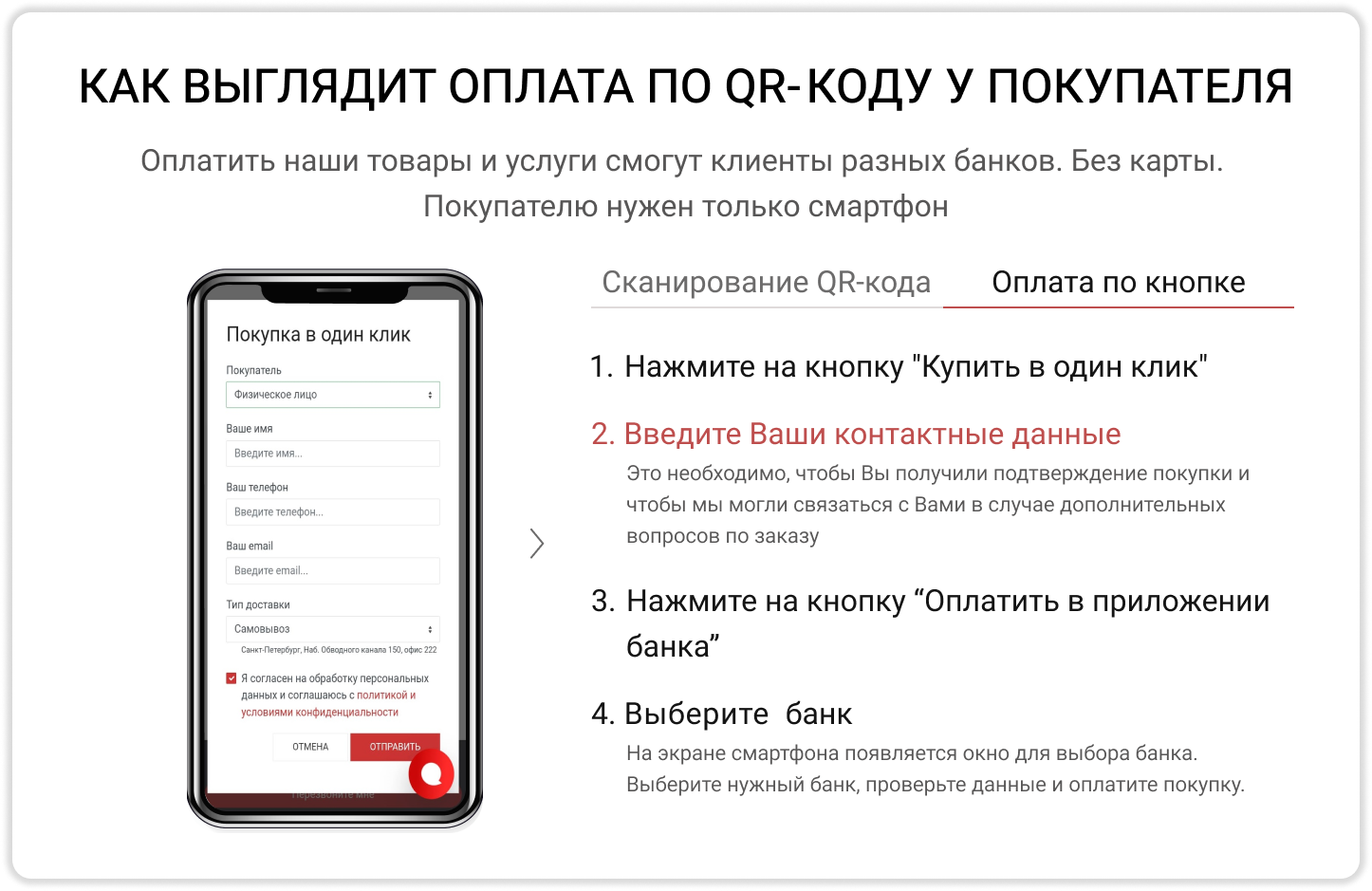
Покупка в один клик
По техническим причинам покупка на сайте в данный момент невозможна !